Explore
Featured
Recent
Articles
Topics
Login
Upload
Featured
Recent
Articles
Topics
Login
Upload
Search Results for 'path space'
path space published presentations and documents on DocSlides.
Motion Planning for Point Robots
by tawny-fly
I400/B659: Intelligent Robotics. Kris Hauser. Age...
New 2.5m wide bridge crossing connecting either side of
by aaron
Bulmans. Road. Concrete culvert crossing and pat...
C omputational Complexity Theory
by karlyn-bohler
Lecture 7:. . Relativization. (contd.);. . ...
Uninformed search strategies
by luanne-stotts
A . search strategy . is defined by picking the o...
Motion Planning for Point Robots
by natalia-silvester
CS 659. Kris Hauser. Agenda. Skimming through . P...
Mars: On the Path or In The Way?
by slygrat
Brent Sherwood. brent.sherwood@jpl.nasa.gov. . GL...
Configuration Space
by danika-pritchard
Kris Hauser. Assistant Professor of Computer Scie...
1 Informed Search
by lindy-dunigan
Problems. CSD 15-780: Graduate Artificial Intelli...
Visibility Graph
by karlyn-bohler
Team . 10. NakWon. Lee, . Dongwoo. Kim. Robot M...
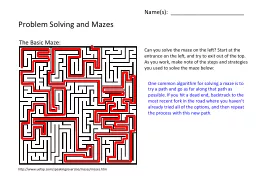
Name(s): _______________________
by calandra-battersby
Problem Solving and Mazes. http://. www.uefap.com...
EE359 – Lecture 2 Outline
by sherrill-nordquist
Announcements. 1. st. HW . posted, . due next Th...
EE359 – Lecture 2 Outline
by yoshiko-marsland
Announcements. 1. st. HW posted by tonight, due ...
Uninformed search strategies
by jane-oiler
A . search strategy . is defined by picking the o...
Uninformed search strategies
by jane-oiler
A . search strategy . is defined by picking the o...
How are things going?
by olivia-moreira
Core AI Problem. Mobile robot path planning: ide...
Homework 1
by cheryl-pisano
Lab 3: . Kinematics. Vision. Open loop control vs...
Your Biz-
by stefany-barnette
Nas. You are opening a sole proprietorship or LLC...
C omputational Complexity Theory
by sherrill-nordquist
Lecture 9:. Read once certificates;. . ...
Autonomous Cyber-Physical Systems:
by marina-yarberry
Decision-making and planning. Spring 2018. CS 599...
Motion Planning in Dynamic Environments
by yoshiko-marsland
Two Challenges for Optimal Path planning. Classic...
EE359 Lecture 2 Outline
by stingraycartier
Announcements. 1. st. HW posted, due next Friday ...
Bicriteria Rectilinear Shortest Paths among Rectilinear
by BraveBlackbird
Obstacles in . the Plane. Haitao Wang. Utah State ...
Lecture 3 Radio Propagation
by martin
Simplified model of a digital communication system...
How are things going? Core AI Problem
by lucinda
Mobile robot path planning: identifying a traject...
State Space Representations
by trish-goza
and Search Algorithms. CS171, Fall 2017. Introduc...
State Space
by faustina-dinatale
Search I. Chapter 3. The Basics. State Space. Pro...
Forward
by celsa-spraggs
Kinematics and Configurations. Kris Hauser. I400/...
Connecting Nonlinear Time Series Analysis with Physics
by alexa-scheidler
Henry D. I. Abarbanel. Department of Physics . an...
Flight Path: Exploring a Career in Aerospace
by stefany-barnette
Engineering . Sheldon Clark. Raytheon. Agenda. To...
Sampling-Based Planners The complexity of the robot’s free space is overwhelming
by cheryl-pisano
T. he . cost of computing an exact representation...
State Space Representations
by stefany-barnette
and Search Algorithms. CS171, . Winter 2018. Intr...
Space Science Test Review
by cheryl-pisano
We are going to review for Thursday’s space sci...
CS151 Complexity Theory
by giovanna-bartolotta
CS151 Complexity Theory Lecture 4 April 12, 201...
The Location of Papers in Topic Space-Time
by goldengirl
© Imperial College London. Page . 1. http://knowe...
THEORY OF COMPUTATION TOPIC:COMPLEXITY CLASSES
by cadie
SPACE COMPLEXITY. SHESHAN SRIVATHSA. INTRODUCTION....
Uninformed Search
by cheryl-pisano
Jim Little. UBC CS 322 – Search . 2. September ...
Collage Assignment Examples
by celsa-spraggs
ASM 2O1. Spiral Composition Using Images. Choose ...
Sampling-Based Planners
by giovanna-bartolotta
The complexity of the robot’s free space is ove...
Department
by natalia-silvester
of . Computer. . Science. Columbia. . Universit...
Yak: A High-Performance Big-Data-Friendly
by calandra-battersby
Garbage Collector . Khanh Nguyen. , Lu Fang, . Gu...
Load More...